Autonomous “burger transporter” robot CAPSTONE project
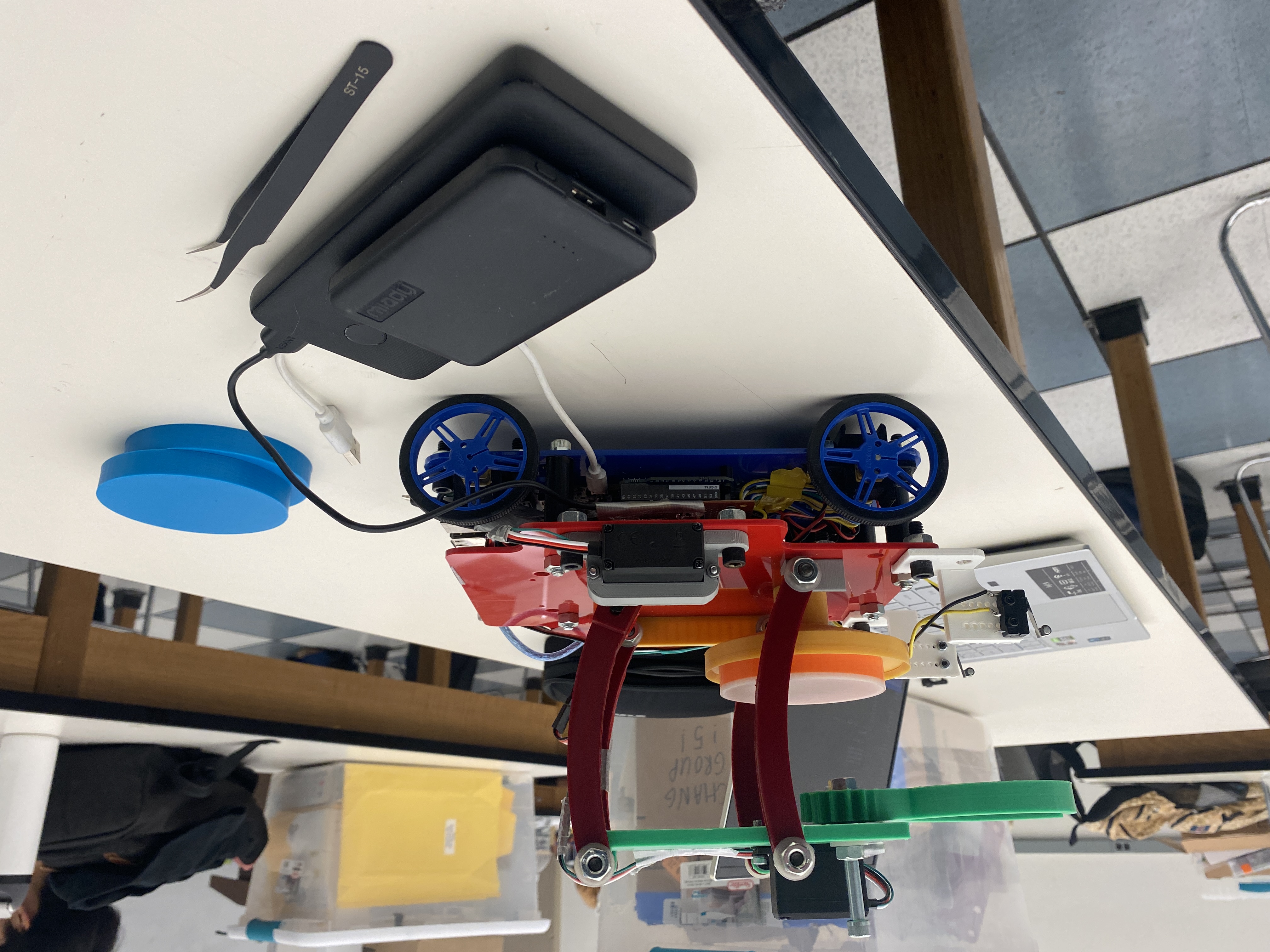
Hardware Design
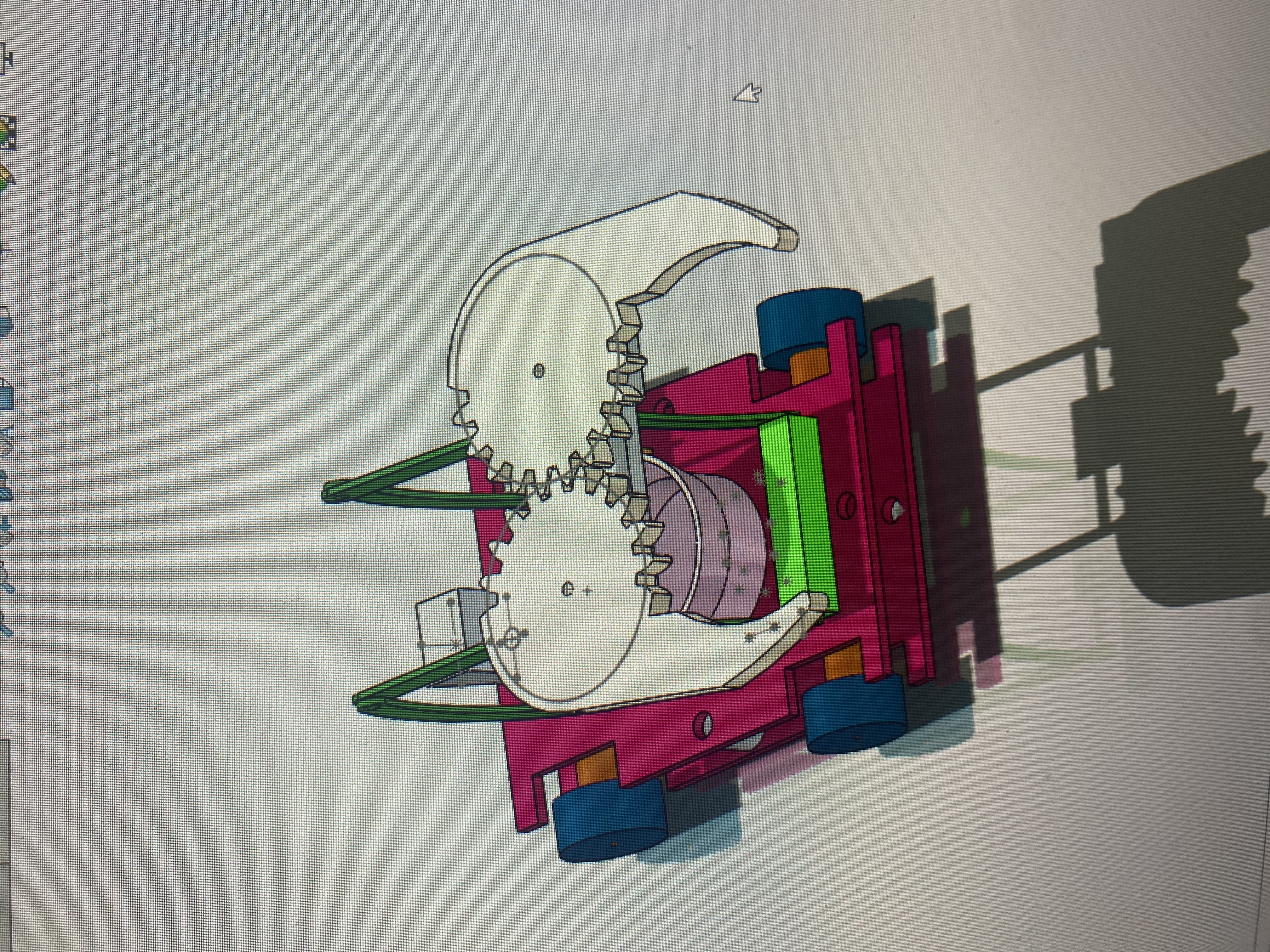
Model
| Component | Description |
|---|---|
| Wheels | Pololu |
| Wheel motor | Pololu |
| Simple DC Motor Driver | Pololu |
| Servo for gripper | Pololu |
| Servo for four bar | Pololu |
| Elegoo MEGA2560 R3 | Elegoo |
| Rasberry Pi Camera | Adafruit |
| Rasberry Pi 4 | Adafruit |
| Battery | Pololu |
| 5V voltage regulator | Pololu |
| 5V battery pack | Amazon |
| Large IR Sensor Array | Pololu |
| JR Connectors (M) | Pololu |
| JR Connectors (F) | Pololu |
| 22 AWG Wire | Amazon |
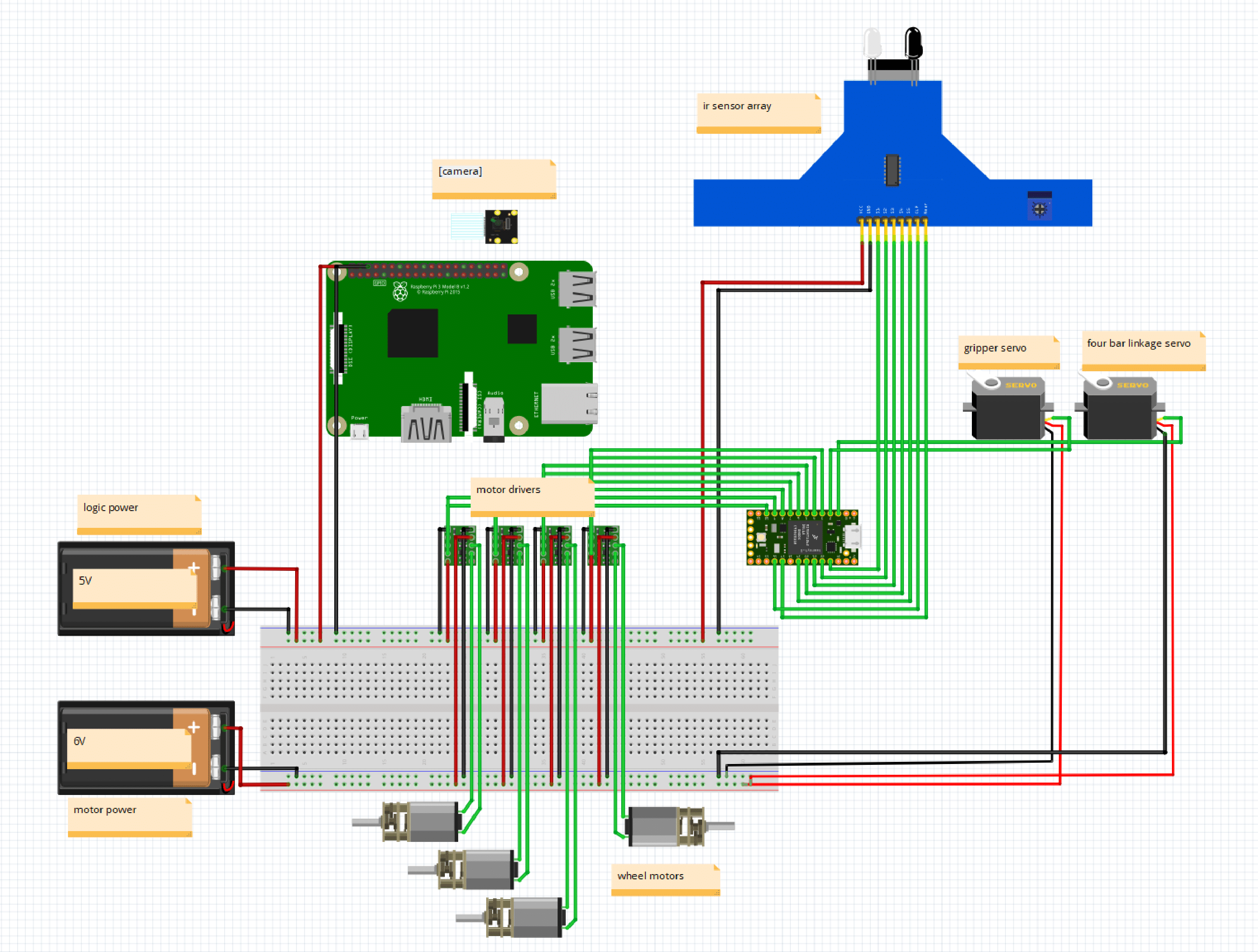
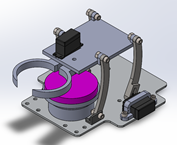
Schematic
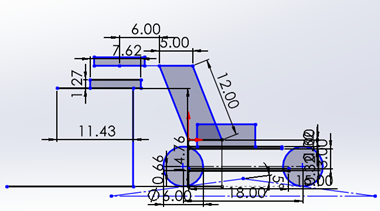
Four-bar linkage
Code
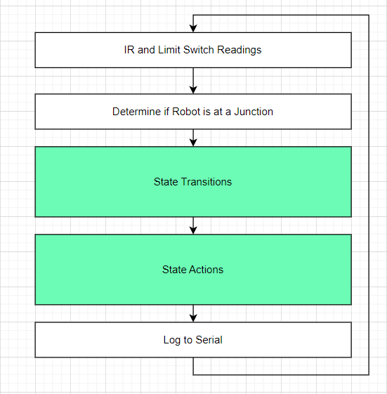
State machine
#include <Arduino.h>
#include <motor.h>
#include <constants.h>
#include <fns.h>
#include <rpi.h>
#include <state.h>
#include <QTRSensors.h>
#include <controller.h>
#include <claw.h>
enum JunctionType {
NONE,
LEFT,
RIGHT,
T,
};
State state;
RPI rpi(19200);
Claw grabber(four_bar_pwm_pin, claw_pwm_pin, four_bar_potentiometer_pin, claw_potentiometer_pin);
QTRSensors lf;
Controller base_controller(Kp, Kd);
Motor motors[] = {Motor(m_pin[0][0], m_pin[0][1]),
Motor(m_pin[1][0], m_pin[1][1]),
Motor(m_pin[2][0], m_pin[2][1]),
Motor(m_pin[3][0], m_pin[3][1])};
int dropoff_location = 6;
int dropoff_target = 2;
int return_junction(bool left_readings[readings], bool right_readings[readings]) {
bool right_is_black = false;
bool left_is_black = false;
int right_tally = 0;
int left_tally = 0;
for (int i = 0; i < readings; i++){
if (right_readings[i]) right_tally++;
if (left_readings[i]) left_tally++;
}
if (right_tally >= 1 && left_tally >=1) return T;
else if (right_tally >= readings) return RIGHT;
else if (left_tally >= readings) return LEFT;
else return NONE;
}
bool switchPressed_L = false;
bool switchPressed_R = false;
bool switchPressed = false;
int reflectance_counter = 0;
bool left_reflectance_readings[3] = {false, false, false};
bool right_reflectance_readings[3] = {false, false, false};
void loop() {
state.time_ms = millis();
state.left_limit_switch = digitalRead(limit_switch_left); // 1 if not pressed 0 if pressed
state.right_limit_switch = digitalRead(limit_switch_right); // 1 if not pressed 0 if pressed
uint16_t sensors[num_line_sensors];
state.position = lf.readLineBlack(sensors);
memcpy(state.ssr, sensors, sizeof(sensors));
state.left_low_reflectance = true;
state.right_low_reflectance = true;
int right_turn_cutoff_index = 4;
int left_turn_cutoff_index = 8;
for (int i = num_line_sensors-1; i > right_turn_cutoff_index; i--) {
if (sensors[i] < 700) {
state.left_low_reflectance = false;
}
}
for (int i = 0; i < left_turn_cutoff_index; i++) {
if (sensors[i] < 700) {
state.right_low_reflectance = false;
}
}
left_reflectance_readings[reflectance_counter] = state.left_low_reflectance;
right_reflectance_readings[reflectance_counter] = state.right_low_reflectance;
reflectance_counter++;
if (reflectance_counter >= readings) reflectance_counter = 0;
if (state.slow_cycles > 0) {
state.slow_cycles--;
}
else {
switch (state.current_function) {
case 0: // Normal Line Following
switch (return_junction(left_reflectance_readings, right_reflectance_readings)) {
case LEFT: // 90 degree left turn
state.current_function = 1;
state.counted_left_junctions++;
state.slow_cycles = 10;
break;
case RIGHT: // 90 degree right turn for manuvering
state.slow_cycles = 10;
state.counted_right_junctions++;
if (state.counted_right_junctions == dropoff_location){
state.current_function = 2;
}
break;
case T: // T junction
// state.current_function = 3;
motors[0].set_speed(4);
motors[1].set_speed(4);
motors[2].set_speed(4);
motors[3].set_speed(4);
delay(0.09e3);
state.counted_T_junctions++;
state.slow_cycles = 15;
//@ all T junctions take a right
state.current_function = 2;
break;
case NONE:
break;
}
break;
case 1: // 90 degree left turn for manuv
{
int left_solid_sensor_readings = 0;
for (int i = 0 ; i < num_line_sensors; i++) {
if (sensors[i] > 800) left_solid_sensor_readings++;
}
if (left_solid_sensor_readings >= 3) state.current_function = 0;
break;
}
case 2: // 90 degree right turn for objective
{
int right_solid_sensor_readings = 0;
for (int i = 0; i < num_line_sensors; i++) {
if (sensors[i] > 800) right_solid_sensor_readings++;
}
if (right_solid_sensor_readings >= 3) state.current_function = 22;
}
break;
case 22: // Line follow until wall then grab or release
case 221:
case 220:
{
if (!state.left_limit_switch || !state.right_limit_switch) {
motors[0].set_speed(0);
motors[1].set_speed(0);
motors[2].set_speed(0);
motors[3].set_speed(0);
switch (state.disk_num) {
case 0:
grabber.grabDisc(disc_positions[state.disk_num]);
state.disk_num++;
break;
case 1:
grabber.grabDisc(disc_positions[state.disk_num]);
state.disk_num++;
break;
case 2:
grabber.grabDisc(disc_positions[state.disk_num]);
state.disk_num++;
state.straight_cycles = 8e3 / 50;
break;
case 3:
grabber.releaseDisc();
}
state.current_function = 222;
}
else if (!state.left_limit_switch){
state.current_function = 220;
}
else if (!state.right_limit_switch)
{
state.current_function = 221;
}
break;
}
case 222: // Reversing from obj
{
if (state.left_low_reflectance && state.right_low_reflectance) {
motors[0].set_speed(7);
motors[1].set_speed(7);
motors[2].set_speed(7);
motors[3].set_speed(7);
delay(200);
state.current_function = 1;
state.slow_cycles = 15;
}
break;
}
case 3: // placing the object
break; //just stay here for now
default:
state.current_function = -1;
// delay(1e6);
break;
}
}
switch (state.current_function) {
case 0: // Normal Line Following
case 22:
state.error = state.position - line_center_position;
state.controller_output = base_controller.update(state.error);
if (state.straight_cycles > 0) {
state.straight_cycles--;
state.base_speed = 10;
}
else state.base_speed = base_speed;
state.left_speed = clamp(state.base_speed + state.controller_output, -clamp_max_speed, clamp_max_speed);
state.right_speed = clamp(state.base_speed - state.controller_output, -clamp_max_speed, clamp_max_speed);
if (!state.left_limit_switch || !state.right_limit_switch) {
state.left_speed = 0;
state.right_speed = 0;
}
break;
case 220:
state.left_speed = 10;
state.right_speed = 0;
break;
case 221:
state.left_speed = 0;
state.right_speed = 10;
break;
case 222: // Reverse Line Follow
state.error = state.position - line_center_position;
state.controller_output = base_controller.update(state.error);
state.left_speed = -3;
state.right_speed = -3;
break;
case 1: // 90 degree left turn
state.left_speed = clamp(turn_speed, -clamp_max_speed, clamp_max_speed);
state.right_speed = clamp(-turn_speed, -clamp_max_speed, clamp_max_speed);
// Code for 90 degree left turn mode
break;
case 2: // 90 degree right turn
state.left_speed = -turn_speed;
state.right_speed = turn_speed;
break;
case 3: //placing the object
state.left_speed = 0;
state.right_speed = 0;
break;
default:
state.current_function = -11;
// delay(1e6);
break;
}
motors[0].set_speed(state.left_speed);
motors[1].set_speed(state.left_speed);
motors[2].set_speed(state.right_speed);
motors[3].set_speed(state.right_speed);
Serial.print(state.log());
}
State:
0: Line Following Forward
1: Left Turn
2: Right Turn
3: Line Following Backward
Picking up the Disk
- On every T Junction take a right and enter the following transition sequence
- Take a right
- Line follow forward until limits switches are activated
- Grab Disk
- Drive Backwards until T
- Take a Left
- Line Follow
Placing Disk
- Count # Right turns to determine when to take Right
- Take a right
- Line follow forward until limit switches
- Release Disks
- Drive Backwards until T
- Take a Left
- Line Follow
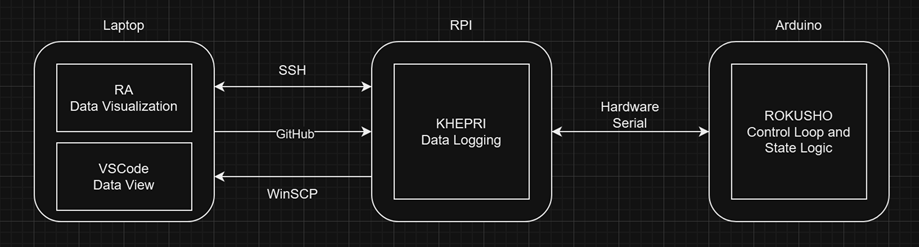
Communication protocol
Setup
void setup() {
rpi.begin();
if (rpi.wait_rpi_ready(1e6) == 1) {
// Timeout, hold forever
while (true) {delay(10000000);}
}
lf.setTypeAnalog();
lf.setSensorPins(line_follower_pins, num_line_sensors);
pinMode(limit_switch_left, INPUT_PULLUP);
pinMode(limit_switch_right, INPUT_PULLUP);
grabber.begin();
digitalWrite(calibration_LED_pin, HIGH);
for (uint8_t i = 0; i < calibration_iterations; i++)
{
lf.calibrate();
delay(20);
Serial.println(i);
}
digitalWrite(calibration_LED_pin, LOW);
delay(10e3);
rpi.sendMessage("ARDUINO_READY");
rpi.sendMessage(state.log_header());
}
Calibration Sequence

Documentation
Build Log
5-29-24:
5-19-24: 4 bar linkage test
5-11-24:

3-15-24:
2-21-24: